
Project SEAR (Small Exploration Assistant Rover) is about the development of an autonomous planetary rover with the same name, which could be used in an extraterrestrial mission scenario. The project was initiated in April 2013 when the German Aerospace Center (DLR) announced the “SpaceBot Cup 2013”. In this robotic competition, participants were to fulfill a wide range of tasks on a Mars-like surface. An unknown region, which was characterized by many obstacles, was to be explored and mapped. Two object were to be found and transported to another, third object. The main challenges hereby lay in the requirements to fulfill all tasks autonomously without radio controlled interference (except for checkpoints) and that all communication was altered to be typical for this kind of scenario. This resulted in a delayed communication line with reoccurring blackouts when no communication was possible.
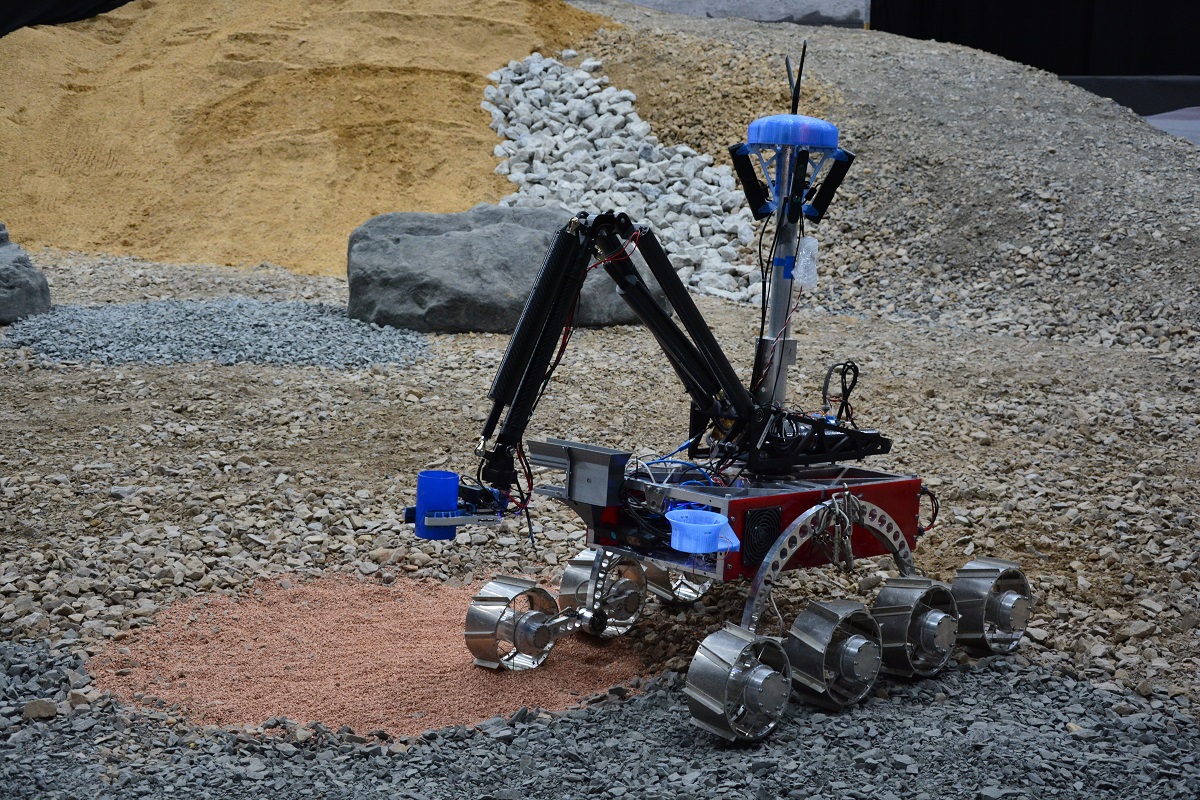
In a very short development time of only about six months, a system was created during the summer semester 2013 and the following months. Nonetheless it was able to successfully participate in the SpaceBot Cup 2013. Many foundations were laid during this time, which are until today the basis of the robot. Its eight wheeled chassis allows the rover to overcome obstacles such as rubble, sand and slopes. A manipulator allows SEAR to grasp objects and place them in specifically designed transport containers for transport.
Team SEAR was able to re-gain support for the SpacBot Cup 2015 when it was announced in 2014. The “DLR SpaceBot Cup” is organized by the German Aerospace Center (DLR) with aids from the “Bundesministeriums für Wirtschaft und Technologie” and shall support the development of technological enhancements in the field of space robotics. Constraints for the new competition stayed the same as in 2013.
Leave A Comment